
搜索到
59
篇与
的结果
-
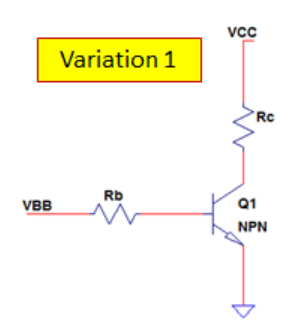
 三极管常见电路汇总 关于三极管的应用电路有很多,今天就汇总一下比较典型的三极管电路,对比一起区别点以及对应的应用场合。1.下图是最简单的三极管放大电路了。VCC 是集电极电源,VBB 是施加到基极的电压,基极和集电极都串联了限流电阻:Rb 和 Rc。这种电路连接方式对于低侧驱动负载是非常常见的。2.下图的三极管电路增加了发射极电阻。这个电阻可以用来设置发射极电压,这对于工作与放大区的三极管来说是很常见的,这个电路有负反馈的作用,比如当流过集电极的电流增大时,Re上的压降就会增大,从而Rb上的电压会降低,基极的电流也会降低,那么集电极的电流会对应降低,最终实现了负反馈动态调节。3.下面的电路图和第一个电路图基本相同,只是增加了电阻器 Rb1。实际上Rb1 在实际应用中非常重要,因为当三极管基极没有电压输入时,Rb1的存在可以确保基极是接地的,因此,这样做可以防止噪声误导通NPN晶体管。4.下图和第三个电路图基本相同,区别在于在发射极中加了一个电阻Re。这个电阻就是为了设置发射极电压。通过添加 Re 可以很容易地将 NPN 晶体管的配置到放大区工作。5.下面的电路图其实就是把基极驱动电压由VBB改成了VCC的分压,这样一个电源就能搞定三极管放大电路静态工作点的配置。需要注意的是电容 C1 和 C2 别弄混了,当我们对三极管放大电路进行DC 分析时,这些电容被视为开路,这样便于分析静态工作点,方便我们确认三极管是否工作在放大区,同时电容还能隔直通交,从过在Cin施加小信号,我们便能完成对小信号的放大以及输出。转载自:https://www.elecfans.com/d/1825277.html
三极管常见电路汇总 关于三极管的应用电路有很多,今天就汇总一下比较典型的三极管电路,对比一起区别点以及对应的应用场合。1.下图是最简单的三极管放大电路了。VCC 是集电极电源,VBB 是施加到基极的电压,基极和集电极都串联了限流电阻:Rb 和 Rc。这种电路连接方式对于低侧驱动负载是非常常见的。2.下图的三极管电路增加了发射极电阻。这个电阻可以用来设置发射极电压,这对于工作与放大区的三极管来说是很常见的,这个电路有负反馈的作用,比如当流过集电极的电流增大时,Re上的压降就会增大,从而Rb上的电压会降低,基极的电流也会降低,那么集电极的电流会对应降低,最终实现了负反馈动态调节。3.下面的电路图和第一个电路图基本相同,只是增加了电阻器 Rb1。实际上Rb1 在实际应用中非常重要,因为当三极管基极没有电压输入时,Rb1的存在可以确保基极是接地的,因此,这样做可以防止噪声误导通NPN晶体管。4.下图和第三个电路图基本相同,区别在于在发射极中加了一个电阻Re。这个电阻就是为了设置发射极电压。通过添加 Re 可以很容易地将 NPN 晶体管的配置到放大区工作。5.下面的电路图其实就是把基极驱动电压由VBB改成了VCC的分压,这样一个电源就能搞定三极管放大电路静态工作点的配置。需要注意的是电容 C1 和 C2 别弄混了,当我们对三极管放大电路进行DC 分析时,这些电容被视为开路,这样便于分析静态工作点,方便我们确认三极管是否工作在放大区,同时电容还能隔直通交,从过在Cin施加小信号,我们便能完成对小信号的放大以及输出。转载自:https://www.elecfans.com/d/1825277.html -
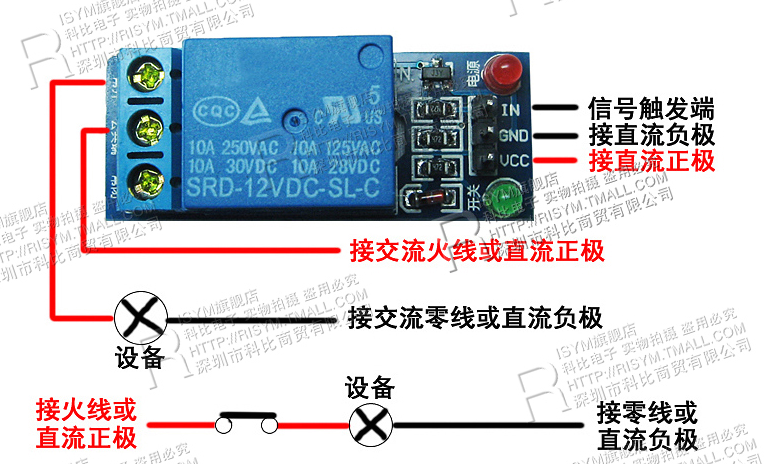
树莓派控制继电器 树莓派引脚图此时选用的继电器为5v驱动,低电平触发的方式。如图由于是5v驱动,可以直接用树莓派进行供电,然后gpio来控制触发。连接方式:VCC端 连接树莓派物理引脚2或者4(我用的2)GND端 连接树莓派物理引脚6、9、14、20、25、30、34、39都行(我用的20)IN端 连接树莓派物理引脚很多,标志为gpio的都可以用(我用的22)树莓派配置python方式 pip install RPi.GPIO pip install spidev编写代码 import RPi.GPIO as GPIO import time # GPIO.setmode(GPIO.BOARD) # BOARD编号方式,基于插座引脚编号(如果是此模式,后面的引脚即为22) GPIO.setmode(GPIO.BCM) # 若使用BCM编号方式,上两行代码应这样写 while True: GPIO.setup(25, GPIO.OUT) # 对应为22号脚(设置为输出模式) GPIO.output(25, GPIO.HIGH) time.sleep(3) # 单位秒 # GPIO.output(11, GPIO.LOW) # 这里其实不用将其致为第电压,后面详细会说 GPIO.setup(25, GPIO.IN) # 对应为22号脚 time.sleep(3)然后运行该程序python **(该文件名).py此时继电器立马吸合然后三秒后断开,再过三秒,又吸合,如此循环解释:代码中有个小问题,就是触发继电器用的高电平,为什么恢复的时候用的引脚不是低电平,而是用的输入模式呢?此时:要考虑一个问题,继电器什么时候会吸合,什么时候会恢复呢?应该是形成合适的电压差的时候会吸合,电压差不合适的时候恢复。(先不考虑电流)那么此继电器是什么时候吸合呢。据官方文档说如下图由此可以得出结论,当GND和IN端口形成通路,同时IN端口的电压小的时候会进行吸合,电压大的时候会恢复。实验阶段:(用电流表进行测试,说某个端口的电压是其和接地的电压差)question:那么当树莓派控制gpio端口高电平和低电平的时候,此gpio的端口电压是如何变化的?answer:经测量, 当gpio输出高电平,电压3.3v 当输出低电平的时候,电压为0vquestion:默认情况下,IN的电压是如何呢?answer:经测量,电压大约4.9vquestion:当gpio输出高低电平的时候,IN端口的电压分别如何呢?answer:经测量,gpio输出高电平的时候,IN端口3.3v,输出低电平的时候,IN端口是0vquestion: 当gpio为输入模式的时候,IN端口电压如何?answer:经测量,电压为默认值,4.9v左右结论:由此可以得出结论了: 低电压触发,电压得足够低的时候才能触发继电器吸合,当输出高电平的时候(3.3v)其实已经达到的继电器吸合的电压要求,再继续输出低电平, 电压达到0v,还是在工作电压内,只有将电压恢复到默认,继电器才会恢复,所以,将gpio的模式调整为输入模式。此时继电器吸合。c语言实现配置 sudo apt-get install wiringpi mkdir WiringPI #创建WiringPI文件夹 cd WiringPI # wget https://project-downloads.drogon.net/wiringpi-latest.deb sudo dpkg -i wiringpi-latest.deb代码编写 #include <stdio.h> #include <wiringPi.h> int main(void) { int LED = 0; wiringPiSetup(); pinMode(LED, OUTPUT); // 在wiringPi编号格式中,GPIO0编号为0 printf("relay is working...\r\n"); while(1) { pinMode(LED, OUTPUT);delay(1000); printf("relay :%d is on \r\n", LED); pinMode(LED, INPUT);delay(1000); printf("relay :%d is off \r\n", LED); } return 0; }运行程序 gcc -o runfile filename.c -lwiringPi # 编译并生成可执行文件 ./runfile # 运行可执行文件结果:此时继电器一秒闭合一秒打开,如此循环
-
-
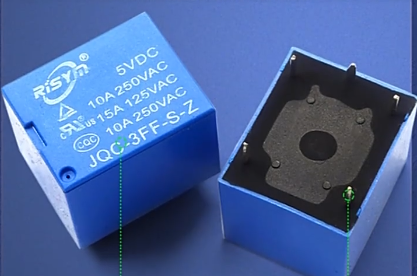
继电器 继电器是什么东西呢?简单说:通过小电流驱动电路,开关大电流电压的一种装置(原理是通过电磁产生吸力,闭合开关,电磁消失,打开开关)如图3:0:弹簧,用于拉动4铁片,使图中动触点默认情况下是和静触点1接触的。1:驱动电流正极2:驱动电流负极3:电磁铁,当1、2中电流通过时,电磁铁会产生吸力,吸附4(不同模块对于1、2件的电压有不同的要求,目的是产生合适的吸力)4:铁片,用于拉动动触发点移动,致使5和6或者7形成通路5:公共端口,连接负载的正极或者是负极6:常闭端口,连接负载的正极或者负极,默认情况下和5产生通路7:常开端口,连接负载的正极或者负极,默认情况下是开路状态,在3吸附4后和5产生通路
-
彻底停止window10自动更新 第一步:关闭Windows Update服务。打开“运行”窗口,输入“services.msc"打开。在其”服务“界面中,找到”Windows Update"项双击打开。接下来在其“属性”界面中,点击“停止”按钮后,再将“启动类型‘设置为”禁用“项。然后再切换到“恢复”选项卡,将默认的“重新启动服务”改为“无操作”项,最后点击“应用”和“确定”按钮即可。第二步:在组策略中关闭Win10自动更新服务。打开”运行“窗口,输入’gpedit.msc"打开。待打开组策略编辑界面后,按图示进行操作依次展开 计算机配置 -> 管理模板 -> Windows组件 -> Windows更新项进行双击打开。接下来找到”配置自动更新 “项并双击进入,在其弹出的窗口中勾选”已禁用“项,点击”确定“按钮。同时我们还需要在找到“删除使用所有Windows更新功能的访问权限”选项,在”属性“界面中,选择已启用项,最后点击”确定“按钮即可。第三步:禁用计划任务中的“自动更新系统”相关进程。在其“运行”窗口中输入“taskschd.msc”进入。在其“计划任务”界面后,扫图示操作,依次展开 【任务计划程序库 -> Microsoft -> Windows -> WindowsUpdate】,在此直接将其中的所有项目禁用即可。第四步:在注册表中禁用Windows Update更新系统服务。在“运行”窗口中输入“regedit"打开并进入。从打开的注册表界面中,依次展开[HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Services\UsoSvc],并在右侧找到“Start”键。双击”Start“键值打开,将其中的数值设置为”4“,点击”确定“按钮。接着我们在找到“FailureActions”键,双击打开,并将“0010”、“0018”行的左起第5个数值由原来的“01”改为“00”,最后点击“确定”即可。至此,我们就实现了彻底永久关闭Windows10自动更新功能了。
-
drone-cli 自动发布 引子最近公司业务重构,架构升级到了微服务,模块是一个接着一个的加,更新发布手动打包上传是真的麻烦,一件很无聊的事。有问题就有解决办法,搞个自动发布不就行啦。目前接触和使用过的几种自动发布的方案有如下:直接使用docker:流程如下,服务器端安装号docker服务端,并开启远程访问(开启使用密钥登录),如果使用idea开发,在插件市场安装docker插件,配置好远程服务器地址并能正确访问,在项目内编写好DockerFile,配置编译或者打包或者发布的时候关联docker build 构建docker镜像,然后通过idea的docker操作栏进行容器的启动。git + maven + shell 脚本:这个是属于半自动发布吧,流程是这样,服务器安装配置好git和maven,在IDE里编辑好代码后,push到git仓库,服务器编写一个shell脚本(python 或者bat脚本也行,只要可以操作maven和git),通过ssh登录到远程服务器后运行该脚本(此脚本的处理流程为,拉取指定仓库的代码,切换到指定的分支,maven编译和打包该代码,将原来的程序文件备份,命令行操作停止原来的程序,启动此版本的程序),完成程序更新。git仓库(gitlab或者gogs此类带webhook的仓库)+ 自动发布的程序(Jenkins或者drone-cli)这种自动化程度比较高,定制性也比较强,总体的流程为提交代码,触发git仓库的webhook,webhook访问自动发布程序,自动发布程序根据制定好的流程进行一步步操作,比如,克隆代码->编译->验证->登录远程服务器->拷贝文件->启停应用程序;大体是这个流程。小结目前的常见的就是这几种,当然方式很多,只不过别的没咋接触过,有别的可以下方留言学习下哈。方式千千万,但得找个适合自己的不是,看自己的场景吧,小项目,数量少,服务器数量少,感觉可以用docker,比如自己搞个博客,想改改源代码,直接docker搞起来就行了,如果你的项目比较复杂,编译比较耗时,打好的包比较大,可以用第二种,当然,用第三种结合第二种也行哈,如果项目比较多,部署比较复杂,服务器比较多,第三种应该是个比较好的选择。如果使用第三种,那又要进行一波选择,用哪个程序比较好呢(有实力的可以进行自研。)我只调研过jenkins和drone,Jenkins大名鼎鼎,老牌选手了,功能比较完善,其优点也是其缺点,功能太多了,有点臃肿。drone-cli功能相对来说是比较简单,但是自动发布,定时发布,ssh远程登录,文件拷贝,这些功能都有。drone-cli 依赖docker实现自动发布,基础架构分为服务端和runner,通过webhook调用后进行后续操作。其官网可以看这里 drone官网使用流程:1:安装docker环境都可以找到的资料就不写了,可以看此处《菜鸟教程》的centos安装docker,以下内容是摘抄过来的使用官方安装脚本自动安装安装命令如下:curl -fsSL https://get.docker.com | bash -s docker --mirror Aliyun也可以使用国内 daocloud 一键安装命令: curl -sSL https://get.daocloud.io/docker | sh手动安装卸载旧版本较旧的 Docker 版本称为 docker 或 docker-engine 。如果已安装这些程序,请卸载它们以及相关的依赖项。sudo yum remove docker \ docker-client \ docker-client-latest \ docker-common \ docker-latest \ docker-latest-logrotate \ docker-logrotate \ docker-engine**安装 Docker Engine-Community使用 Docker 仓库进行安装**在新主机上首次安装 Docker Engine-Community 之前,需要设置 Docker 仓库。之后,您可以从仓库安装和更新 Docker。设置仓库安装所需的软件包。yum-utils 提供了 yum-config-manager ,并且 device mapper 存储驱动程序需要 device-mapper-persistent-data 和 lvm2。 sudo yum install -y yum-utils \ device-mapper-persistent-data \ lvm2使用以下命令来设置稳定的仓库。使用官方源地址(比较慢)sudo yum-config-manager \ --add-repo \ https://download.docker.com/linux/centos/docker-ce.repo可以选择国内的一些源地址:阿里云 sudo yum-config-manager \ --add-repo \ http://mirrors.aliyun.com/docker-ce/linux/centos/docker-ce.repo清华大学源sudo yum-config-manager \ --add-repo \ https://mirrors.tuna.tsinghua.edu.cn/docker-ce/linux/centos/docker-ce.repo安装 Docker Engine-Community安装最新版本的 Docker Engine-Community 和 containerd,或者转到下一步安装特定版本:sudo yum install docker-ce docker-ce-cli containerd.io如果提示您接受 GPG 密钥,请选是。有多个 Docker 仓库吗?如果启用了多个 Docker 仓库,则在未在 yum install 或 yum update 命令中指定版本的情况下,进行的安装或更新将始终安装最高版本,这可能不适合您的稳定性需求。Docker 安装完默认未启动。并且已经创建好 docker 用户组,但该用户组下没有用户。要安装特定版本的 Docker Engine-Community,请在存储库中列出可用版本,然后选择并安装:1、列出并排序您存储库中可用的版本。此示例按版本号(从高到低)对结果进行排序。 yum list docker-ce --showduplicates | sort -r docker-ce.x86_64 3:18.09.1-3.el7 docker-ce-stable docker-ce.x86_64 3:18.09.0-3.el7 docker-ce-stable docker-ce.x86_64 18.06.1.ce-3.el7 docker-ce-stable docker-ce.x86_64 18.06.0.ce-3.el7 docker-ce-stable2、通过其完整的软件包名称安装特定版本,该软件包名称是软件包名称(docker-ce)加上版本字符串(第二列),从第一个冒号(:)一直到第一个连字符,并用连字符(-)分隔。例如:docker-ce-18.09.1。sudo yum install docker-ce-<VERSION_STRING> docker-ce-cli-<VERSION_STRING> containerd.io启动 Docker。sudo systemctl start docker通过运行 hello-world 映像来验证是否正确安装了 Docker Engine-Community 。sudo docker run hello-world卸载 docker删除安装包:yum remove docker-ce删除镜像、容器、配置文件等内容:rm -rf /var/lib/docker设置自动自动:systemctl enable docker安装 gogsgogs(一个轻型的git仓库)拉取镜像:docker pull gogs/gogs安装gogsdocker run -p 10022:22 -p 10080:3000 --name=gogs \ -e TZ="Asia/Shanghai" \ -v /mydata/gogs:/data \ -d gogs/gogs浏览器访问:http://192.168.1.165:10080设置好用户名密码和数据库连接后进入gogs后台安装Drone拉取 Drone的Serverdocker pull drone/drone拉取 Drone的Runner(还有ssh runner如果需要自行安装,更多见drone runner)docker pull drone-runner-docker drone server和runner运行Server docker run \ -v /mydata/drone:/data \ -e DRONE_AGENTS_ENABLED=true \ -e DRONE_GOGS_SERVER=http://192.168.1.165:10080 \ -e DRONE_RPC_SECRET=dronerpc666 \ -e DRONE_SERVER_HOST=192.168.1.165:3080 \ -e DRONE_SERVER_PROTO=http \ -e DRONE_USER_CREATE=username:jjia,admin:true \ -e TZ="Asia/Shanghai" \ -p 3080:80 \ --restart=always \ --detach=true \ --name=drone \ drone/droneRunnerdocker run -d \ -v /var/run/docker.sock:/var/run/docker.sock \ -e DRONE_RPC_PROTO=http \ -e DRONE_RPC_HOST=192.168.1.165:3080 \ -e DRONE_RPC_SECRET=dronerpc666 \ -e DRONE_RUNNER_CAPACITY=2 \ -e DRONE_RUNNER_NAME=runner-docker \ -e TZ="Asia/Shanghai" \ -p 3000:3000 \ --restart always \ --name runner-docker \ drone/drone-runner-docker浏览器访问: (用户名密码为gogs的登录名和密码)http://192.168.1.165:3080/创建测试仓库:drone管理端同步仓库配置自动发布的设置gogs配置webhook代码仓库中添加自动发布的脚本--- kind: pipeline type: docker name: test_publish_pipeline #流程触发的方式 trigger: #指定分支 branch: - master #指定事件 event: - push steps: # 定义流水线执行步骤,这些步骤将顺序执行 - name: package # 流水线名称 image: maven:3-jdk-8 # 定义创建容器的Docker镜像 volumes: # 将容器内目录挂载到宿主机,仓库需要开启Trusted设置 - name: mevan-setting path: /usr/share/maven/conf #同步配置 - name: mevan-cache path: /root/.m2 # 将maven下载依赖的目录挂载出来,防止重复下载 commands: # 定义在Docker容器中执行的shell命令 - ls # 应用打包命令 - touch aaa # 应用打包命令 # - mvn clean # 应用打包命令 # - mvn install # 应用打包命令 - name: scp files image: appleboy/drone-scp settings: host: 192.168.1.11 username: root password: from_secret: rootloginpassword port: 22 command_timeout: 2m target: /home/pi/autopublish #tmp目录是远程主机的 source: ./** #需要传输的文件夹,当前目录 - name: start image: appleboy/drone-ssh # SSH工具镜像 settings: host: 192.168.1.11 # 远程连接地址 username: root # 远程连接账号 password: from_secret: rootloginpassword # 从Secret中读取SSH密码 port: 22 # 远程连接端口 command_timeout: 5m # 远程执行命令超时时间 script: #发布 - /home/pi/autopublish/publish.sh volumes: # 定义流水线挂载目录,用于共享数据 - name: mevan-setting #用于mevan下载加速 host: path: /mydata/maven/conf # 从宿主机中挂载的目录 - name: mevan-cache host: path: /mydata/maven/cache # 从宿主机中挂载的目录提交代码,测试脚本内容为:执行后